

▀\äėęÄäØ╩ŪęŲäėÖCŲ„╚╦ūįų„ī¦║ĮŽĄĮyųąĄ─ųžę¬─ŻēKų«ę╗Ż¼ŽÓĻP╦Ńʩ蹊┐│╔╣¹īė│÷▓╗═¼ĖFŻ¼ųTČÓīWš▀ßśī”▓╗═¼æ¬ė├ł÷Š░║═ąĶŪ¾Ż¼įOėŗĪóĖ─▀M┴╦ĘŪ│ŻČÓĄ─▀\äėęÄäØ╦ŃĘ©Ż¼╣Pš▀īó│ŻęŖĄ─▀\äėęÄäØ╦ŃĘ©ų„ę¬Ęų×ķ╦─ŅÉŻ║łDęÄäØ╦ŃĘ©Īó┐šķg▓╔śė╦ŃĘ©ĪóŪ·ŠĆ▓ÕųĄöM║Ž╦ŃĘ©║═Ę┬╔·ųŪ─▄╦ŃĘ©ĪŻ
łDęÄäØ╦ŃĘ©ČÓöĄīóŁhŠ│─Żą═ļx╔ó╗»▒Ē▀_Ż¼╚ń¢┼Ė±łDĄ╚Ż¼Ųõļx╔ó╣سc├Ķ╩÷ŽÓæ¬ĀŅæBŻ¼Į©┴ó╣سcķg┬ōŽĄŻ¼▓óŪ¾ĮŌūŅā×┬ĘÅĮĪŻ
łDęÄäØ╦ŃĘ©Ė∙ō■┬ĘÅĮ╔·│╔ĘĮ╩ĮĄ─▓╗═¼Ęų×ķ╚²ŅÉŻ¼ŲõųąęįłD╦č╦„╦ŃĘ©×ķų„Ż¼ęį╝░BUG╦ŃĘ©║═ä▌ł÷┴”╦ŃĘ©ĪŻ
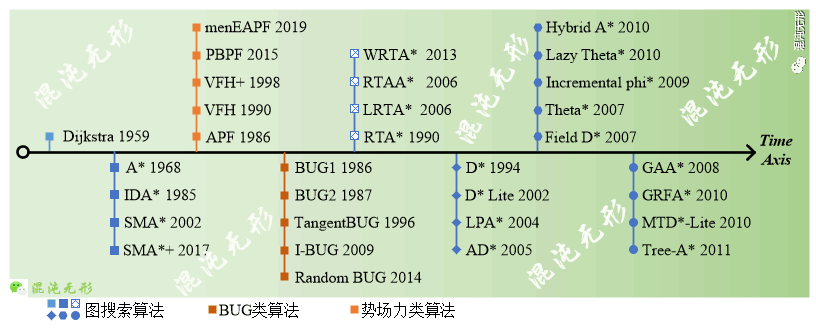
┐šķg▓╔śė╦ŃĘ©░┤šš▓╔śė┐šķg▓╗═¼Ż¼┐╔Ęų×ķŻ║ĀŅæB┐šķg▓╔śė║═▀\äė┐šķg▓╔śėĪŻ
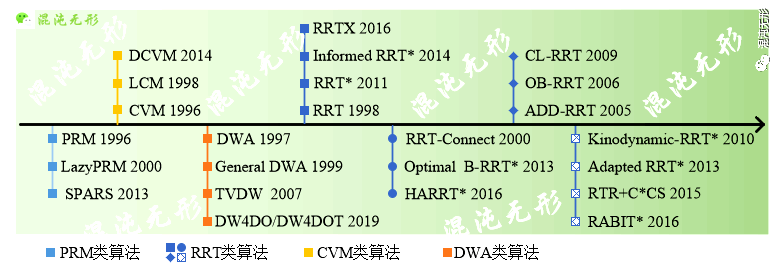
╗∙ė┌ĀŅæB┐šķg▓╔śėĄ─╦ŃĘ©─▄ē“į┌┤¾├µĘeĪóĖ▀ŠĢČ╚Ą─┐šķgųą┐ņ╦┘╔·│╔┬ĘÅĮŻ¼░³└©RRT║═PRMŅÉ╦ŃĘ©Ą╚Ż¼Š▀ėąĖ┼┬╩═ĻéõąįŻ¼Ųõų„ę¬▓Į¾E░³└©ļSÖC▓╔śėĪóČ╚┴┐▀BĮėĪó┼÷ū▓Öz£y║═┬ĘÅĮ▓ķįāĪŻ
╗∙ė┌▀\äė┐šķg▓╔śėĄ─╦ŃĘ©ätį┌╦┘Č╚┐šķgĄ╚ŠÓ▓╔śėŻ¼═©▀^įuār║»öĄ▀xō±ūŅ╝č┐žųŲųĖ┴ŅŻ¼“īäėÖCŲ„╚╦▀\äėŻ¼ų„ę¬░³└©CVMŅÉ╦ŃĘ©╝░DWAŅÉ╦ŃĘ©Ą╚ĪŻ
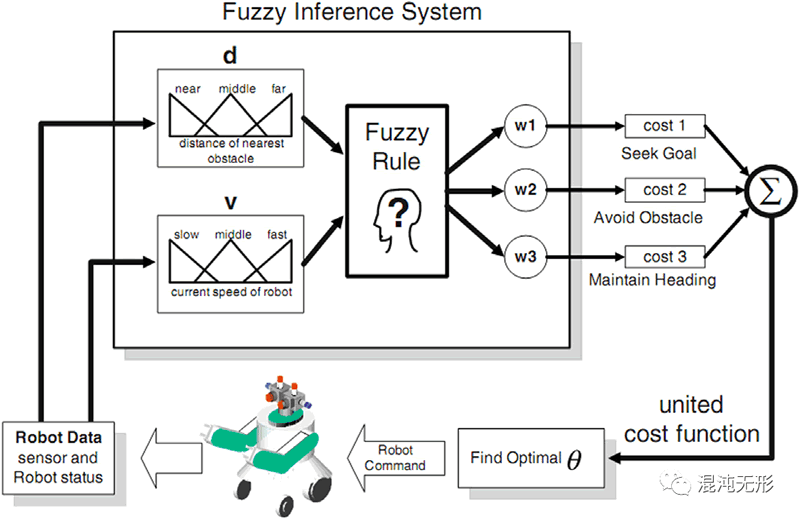
╔Ž╩÷┤¾▓┐ĘųĪČłDęÄäØ╦ŃĘ©ĪĘ║═ĪČ┐šķg▓╔śė╦ŃĘ©ĪĘ╔·│╔Ą─┬ĘÅĮ┤µį┌š█³cĪó╝▒ÅØĄ╚Ū·┬╩▓╗▀B└mĄ─ŪķørŻ¼ė░Ēæ┴╦ÖCŲ„╚╦▀\äėŲĮĘĆąįŻ¼ę“┤╦ąĶꬊC║Ž┐╝æ]─Żą═ė▓╝s╩°┼cīŹļHęÄäØ▄øąĶŪ¾Ż¼ęį╠ß╔²┬ĘÅĮŲĮ╗¼Č╚ĪŻ
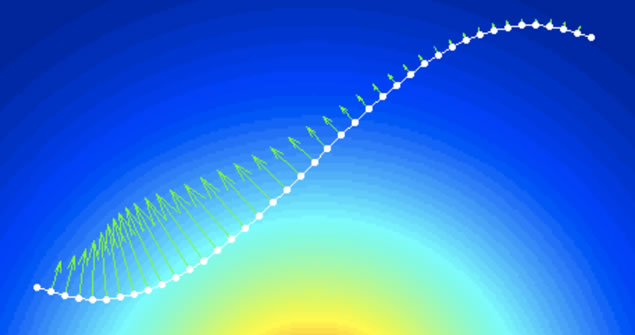
Ū·ŠĆ▓ÕųĄöM║Ž╦ŃĘ©į┌Ū·ŠĆŲĮ╗¼┐žųŲ╝░ā×╗»ĘĮ├µėą’@ų°Ą─ā×ä▌Ż¼░┤ššŪ·ŠĆ╔·│╔ĘĮ╩Į╝░ŲõĘNŅÉ┐╔Ęų×ķŻ║╗∙ė┌▓ÕųĄĄ─ęÄäØ╦ŃĘ©Īó╗∙ė┌╠ž╩ŌŪ·ŠĆĄ─ęÄäØ╦ŃĘ©╝░╗∙ė┌ā×╗»Ą─ęÄäØ╦ŃĘ©╚²ŅÉŻ¼įōŅÉ╦ŃĘ©į┌ūįäė±{±éĄ╚ŅIė“ėąų°ÅVĘ║Ą─æ¬ė├ĪŻ
ßśī”ÖCŲ„╚╦▀\äėęÄäØå¢Ņ}Ż¼│²╔Ž╩÷╗∙ė┌ĮøĄõ─Żą═Ą─ęÄäØ╦ŃĘ©═ŌŻ©ĪČłDęÄäØ╦ŃĘ©ĪĘĪóĪČ┐šķg▓╔śė╦ŃĘ©ĪĘ║═ĪČŪ·ŠĆ▓ÕųĄöM║Ž╦ŃĘ©ĪĘŻ®Ż¼▀Ćėą╔±ĮøŠWĮjĪó─Ż║²▀ē▌ŗ╝░╗∙ė┌ūį╚╗ņ`ĖąĄ─╦ŃĘ©Ż©▀zé„╦ŃĘ©Īó┴Żūė╚║╦ŃĘ©ĪóŽü╚║╦ŃĘ©Ą╚Ż®Ż¼▓óųØu│╔×ķ蹊┐¤ß³cĪŻ
┼cĮøĄõ╦ŃĘ©ŽÓ▒╚Ż¼ųŪ─▄╦ŃĘ©─▄ē“▌^║├▀mæ¬Å═ļsäėæBŁhŠ│ųąĄ─▓╗┤_Č©Īó▓╗═Ļš¹Ą─ą┼ŽóŻ¼Ą½ąĶę¬Ū░Ų┌īW┴ĢļAČ╬║═▌^Ė▀ėŗ╦Ń│╔▒ŠŻ¼▀mė├ė┌┤¾ą═ÖCŲ„╚╦Ż¼╚ń¤o╚╦▄ćĄ╚ĪŻ
łDęÄäØ╦ŃĘ©┼c┐šķg▓╔śė╦ŃĘ©ęčĮø─▄ē“į┌ųTČÓł÷Š░Ž┬Ą─ęÄäØ╔·│╔ę╗Śl¤o┼÷ū▓┬ĘÅĮŻ¼īŹĢrąį║═äėæB▀mæ¬ąįųØu╠ß╔²Ż¼Ą½ČÓöĄ╦ŃĘ©╚į┤µį┌┬ĘÅĮ┘|┴┐▓ŅĪó╬┤┐╝æ]äė┴”īW╝s╩°Ą╚å¢Ņ}ĪŻ
Č°Ū·ŠĆ▓ÕųĄöM║Ž╦ŃĘ©š²║├┼cų«┼õ║ŽŻ¼─▄ē“╚▌ęū╔·│╔▀B└mąį║├Ą─▄ē█EŪ·ŠĆĪŻ
ČÓöĄĘ┬╔·ųŪ─▄╦ŃĘ©╠Ä└ĒäėæBŁhŠ│Ž┬Ą─ęÄäØå¢Ņ}Ģr┤µį┌īŹĢrąįĪó╩šö┐ąįŠ∙▓╗ĘĆČ©Ą╚å¢Ņ}Ż¼īŹļHæ¬ė├▌^╔┘ĪŻ
Å──┐Ū░蹊┐╦╝┬ĘüĒ┐┤Ż¼ČÓ╩ŪŽ╚▓╔ė├łDęÄäØ╦ŃĘ©Īó┐šķg▓╔śė╦ŃĘ©╔·│╔╚½Šų┬ĘÅĮ╗“│§╩╝┬ĘÅĮŻ¼į┘╩╣ė├Ū·ŠĆ▓ÕųĄöM║Ž╦ŃĘ©Ż¼ŠC║Ž┐╝æ]ŽĄĮy▄øė▓╝s╩°Ż¼ā×╗»╔·│╔┘|┴┐║├Ą─▄ē█EĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



