
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
ÖC(j©®)Ų„╚╦╩Ūę╗ĘN╝»ČÓĘN╝╝ąg(sh©┤)┼c╣”─▄Ą─ĮY(ji©”)║Ž¾wŻ¼│²┴╦▄ø╝■╣”─▄═ŌŻ¼Ųõ╦¹ųžę¬▓┐ĘųČ╝╝»ųąį┌ÖC(j©®)Ų„╚╦Ąū▒P▀@ę╗ė▓╝■╔ŽŻ¼╦³│ą▌d┴╦ÖC(j©®)Ų„╚╦Ą─Č©╬╗ī¦(d©Żo)║Į╝░▒▄šŽĄ╚ČÓĘN╣”─▄ĪŻ
Ė∙ō■(j©┤)ĮY(ji©”)śŗ(g©░u)Ą─▓╗═¼Ż¼ÖC(j©®)Ų„╚╦Ąū▒P┐╔Ęų×ķ▌å╩ĮĪóČÓūŃ╩Į╝░┬─Ħ╩ĮĄ╚ĪŻĄ½æ¬(y©®ng)ė├ė┌Ę■äš(w©┤)ÖC(j©®)Ų„╚╦╔Ē╔Žų„ę¬ęį▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒PŠėČÓŻ¼ŽÓī”(du©¼)Č°čįŻ¼▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒PŲĮĘĆ(w©¦n)ąįĖ³║├Īó▀\(y©┤n)äė(d©░ng)įļę¶Ė³Ą═Ż¼Ūę▒Ńė┌čb▓╝░ŠSūo(h©┤)Ż¼ī”(du©¼)ė┌┴óūŃė┌«a(ch©Żn)ŲĘįO(sh©©)ėŗ(j©¼)Ą─═©ė├Ąū▒Pę▓Ė³×ķ║Ž▀mĪŻ

äō(chu©żng)Ø╔ę└┐┐ūį蹥─Ė▀ąį─▄Č©╬╗ī¦(d©Żo)║ĮŽĄĮy(t©»ng)╝░ČÓé„ĖąŲ„╝╝ąg(sh©┤)Ą─╚┌║ŽŻ¼┐╔į┌ČÓĘN╔╠ė├Łh(hu©ón)Š│ųąķ_š╣╣żū„Ż¼¤oąĶ═Ō▓┐Łh(hu©ón)Š│š{(di©żo)š¹╝░╚╦×ķŠÄ│╠įO(sh©©)ų├Ż¼Įė┐┌žSĖ╗Ż¼┐╔öU(ku©░)š╣ąįÅŖ(qi©óng)Ż¼─▄ØMūŃ▓╗═¼æ¬(y©®ng)ė├ąĶŪ¾ĪŻ

äō(chu©żng)Ø╔▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒PŻ¼▓╔ė├Š½╝Ü(x©¼)╗»ĄžłDśŗ(g©░u)Į©╝╝ąg(sh©┤)Ż¼┐╔śŗ(g©░u)Į©│÷Ė▀Š½Č╚Īó└Õ├ū╝ē(j©¬)äeĄžłDŻ¼Š▀ėąĖ▀Ęų▒µ┬╩Ż¼▓╗┤µį┌└█╝ėš`▓ŅĪŻį┌Å═(f©┤)ļsČÓūāĄ─ł÷(ch©Żng)Š░Ž┬ąąū▀Ż¼ę▓─▄ū÷ĄĮäė(d©░ng)æB(t©żi)ūR(sh©¬)äeŁh(hu©ón)Š│ųąĄ─╚╦╗“Ųõ╦¹šŽĄK╬’Ż¼īŹ(sh©¬)¼F(xi©żn)ųŪ─▄ąąū▀ĪŻ
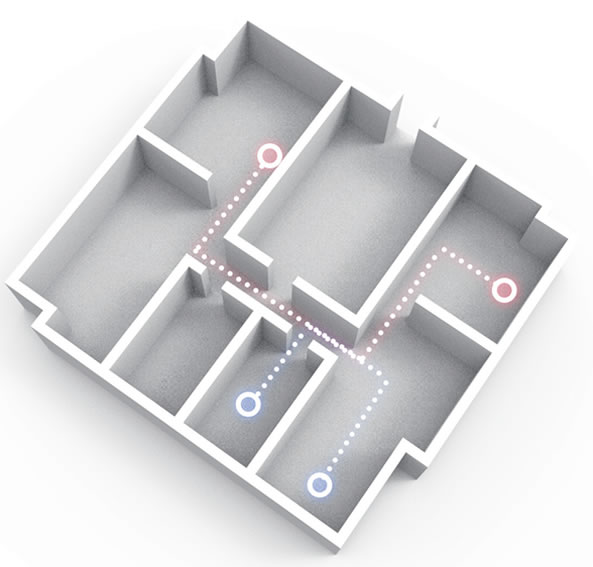
▓╔ė├┴╦ČÓé„ĖąŲ„╚┌║Ž╝╝ąg(sh©┤)Ż¼ĮY(ji©”)║Ž┴╦╝ż╣Ō└ū▀_(d©ó)Īó╔ŅČ╚özŽ±Ņ^Īó│¼┬Ģ▓©ĪóĘ└Ą°┬õĄ╚ČÓĘNé„ĖąŲ„Ż¼╝ż╣Ō└ū▀_(d©ó)┐╔Ä═ų·ÖC(j©®)Ų„╚╦Ģr(sh©¬)┐╠Æ▀├Ķų▄ć·Łh(hu©ón)Š│Ż¼╠ß╣®ĄžłDöĄ(sh©┤)ō■(j©┤)Ż¼śŗ(g©░u)Į©Ė▀Š½Č╚ĄžłDŻ¼▓ó╗∙ė┌įōĄžłDöĄ(sh©┤)ō■(j©┤)īŹ(sh©¬)¼F(xi©żn)ūįų„┬ĘÅĮęÄ(gu©®)äØ╝░ī¦(d©Żo)║Į╣”─▄Ż╗ė÷ĄĮ▓Ż┴¦ĪóńR├µĄ╚Ė▀═Ė▓─┘|(zh©¼)šŽĄK╬’Ģr(sh©¬)Ż¼│¼┬Ģ▓©é„ĖąŲ„─▄ūī╦³ū÷ĄĮ╝░Ģr(sh©¬)ūR(sh©¬)äeĪó▒▄ūīŻ╗╔ŅČ╚özŽ±Ņ^ät┐╔é╔£y(c©©)ĄĮ╬╗ė┌└ū▀_(d©ó)Æ▀├ĶŲĮ├µ╔ŽĘĮĄ─šŽĄK╬’Ż¼▓ó╝░Ģr(sh©¬)░l(f©Ī)╦═ą┼╠¢(h©żo)▀M(j©¼n)ąąęÄ(gu©®)▒▄Ż╗Č°Ę└Ą°┬õé„ĖąŲ„┐╔Ä═▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P╚½ĘĮ╬╗é╔▓ņų▄ć·Ą─╣żū„Łh(hu©ón)Š│Ż¼┼ąöÓ╣żū„ģ^(q©▒)ė“╩Ūʱ┤µį┌▀ģĮńĪó┼_(t©ói)ļAĪóŲ┬Č╚Ą╚ŪķørŻ¼Å─Č°░l(f©Ī)╦═ą┼╠¢(h©żo)šł(q©½ng)Ū¾ÖC(j©®)Ų„╚╦ęŲäė(d©░ng)Ąū▒PĖ─ūāŪ░▀M(j©¼n)ĘĮ▒ŃŻ¼▒▄├ŌĄ°┬õĪŻ
äō(chu©żng)Ø╔ŽĄ┴ąęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒PŻ¼Š▀ėąĖ▀ąį─▄ĪóĖ▀┐╔┐┐ąįĪóĖ▀ąįār(ji©ż)▒╚Ą─Ą─╠ž³c(di©Żn)ĪŻ┐╔ė├ė┌¤o╚╦┼õ╦═Īó¤o╚╦č▓ÖzśI(y©©)Ą╚ČÓĘNęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ż¼═¼Ģr(sh©¬)ķ_Ę┼ĄūīėĮė┐┌Ż¼╣®ė├æ¶▀M(j©¼n)ąąČ■┤╬ķ_░l(f©Ī)ĪŻ
 |
| ÖC(j©®)Ų„╚╦šą╔╠ Disinfection Robot ÖC(j©®)Ų„╚╦╣½╦Š ÖC(j©®)Ų„╚╦æ¬(y©®ng)ė├ ųŪ─▄ßt(y©®)»¤ ╬’┬ō(li©ón)ŠW(w©Żng) ÖC(j©®)Ų„╚╦┼┼├¹ ÖC(j©®)Ų„╚╦Ų¾śI(y©©) ÖC(j©®)Ų„╚╦š■▓▀ Į╠ė²ÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ÖC(j©®)Ų„╚╦ķ_░l(f©Ī) ¬Ü(d©▓)ĮŪ½F Ž¹ČŠÖC(j©®)Ų„╚╦ŲĘ┼Ų Ž¹ČŠÖC(j©®)Ų„╚╦ ║Ž└Ēė├╦Ä ĄžłD |



