

į┌īŹ¼F(xi©żn)ÖCŲ„╚╦ųŪ─▄ī¦(d©Żo)║ĮųąŻ¼SLAM░l(f©Ī)ō]┴╦ųžę¬ū„ė├Ż¼┐╔Ä═ų·ÖCŲ„╚╦īŹ¼F(xi©żn)ĄžłDśŗ(g©░u)Į©┼c╝┤ĢrČ©╬╗Ż¼Ą½āHėąSLAM╩Ū▀Ć▓╗ē“Ą─Ż¼▀ĆąĶę¬╝ė╚ļ┬ĘÅĮęÄ(gu©®)äØ║═▀\äė┐žųŲĪŻį┌SLAM╝╝ąg(sh©┤)Ä═ų·ÖCŲ„╚╦┤_Č©ūį╔ĒČ©╬╗║═śŗ(g©░u)Į©ĄžłDų«║¾Ż¼▀Mąąę╗éĆĮąū÷─┐ś╦(bi©Īo)³cī¦(d©Żo)║ĮĄ──▄┴”ĪŻ═©╦ūĄ─šfŻ¼Š═╩ŪęÄ(gu©®)äØę╗ŚlÅ─A³cĄĮB³cĄ─┬ĘÅĮ│÷üĒŻ¼╚╗║¾ūīÖCŲ„╚╦ęŲäė▀^╚źĪŻ
▀\äėęÄ(gu©®)äØ╩Ūę╗éĆ║▄┤¾Ą─Ė┼─ŅŻ¼Å─ÖCąĄ▒█Ą─▀\äėĪó’wąąŲ„Ą─’wąąŻ¼ĄĮÆ▀ĄžÖCĄ─ŪÕÆ▀Ż¼ÖCŲ„╚╦Ą─ęŲäėŻ¼ŲõīŹ▀@ą®Č╝╩Ūī┘ė┌▀\äėęÄ(gu©®)äØĄ─ĘČ«ĀĪŻ
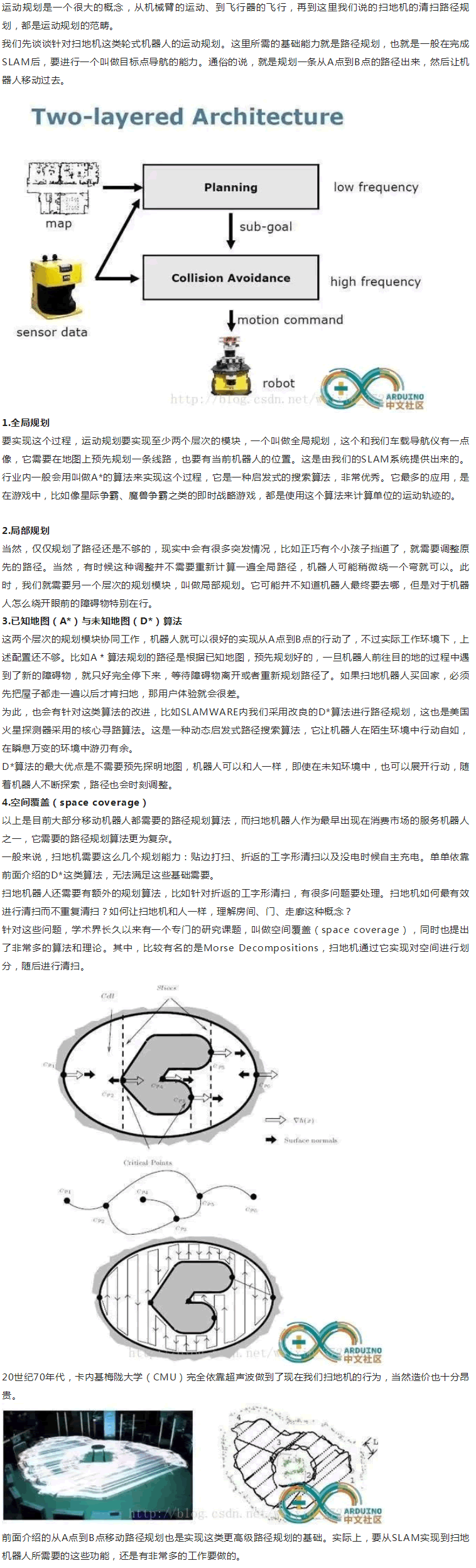
SLAM+┬ĘÅĮęÄ(gu©®)äØ║═▀\äė┐žųŲ=ÖCŲ„╚╦ųŪ─▄ī¦(d©Żo)║Į
▀\äėęÄ(gu©®)äØėą╚½Šų┬ĘÅĮęÄ(gu©®)äØ║═Šų▓┐┬ĘÅĮęÄ(gu©®)äØų«ĘųŻ¼╚½Šų┬ĘÅĮęÄ(gu©®)äØ╩ŪūŅ╔ŽīėĄ─▀\äėęÄ(gu©®)äØ▀ē▌ŗŻ¼╦³░┤ššÖCŲ„╚╦ŅA(y©┤)Ž╚ėøõøĄ─Łh(hu©ón)Š│ĄžłD▓óĮY(ji©”)║ŽÖCŲ„╚╦«ö(d©Īng)Ū░╬╗ū╦ęį╝░╚╬äš(w©┤)─┐ś╦(bi©Īo)³cĄ─╬╗ų├Ż¼į┌ĄžłD╔ŽšęĄĮŪ░═∙─┐ś╦(bi©Īo)³cūŅ┐ņĮ▌Ą─┬ĘÅĮĪŻ
Šų▓┐┬ĘÅĮęÄ(gu©®)äØ╩ŪųĖ«ö(d©Īng)Łh(hu©ón)Š││÷¼F(xi©żn)ūā╗»╗“š▀╔ŽīėęÄ(gu©®)äØĄ─┬ĘÅĮ▓╗└¹ė┌ÖCŲ„╚╦īŹļHąąū▀Ą─Ģr║“Ż©▒╚╚ńÖCŲ„╚╦į┌ąąū▀Ą─▀^│╠ųąė÷ĄĮšŽĄK╬’Ż®Ż¼Šų▓┐┬ĘÅĮęÄ(gu©®)äØīóū÷│÷╬óš{(di©żo)ĪŻ
┼c╚½Šų┬ĘÅĮęÄ(gu©®)äØėą╦∙ģ^(q©▒)äeĄ─╩ŪŻ¼Šų▓┐┬ĘÅĮęÄ(gu©®)äØ┐╔─▄▓ó▓╗ų¬Ą└ÖCŲ„╚╦ūŅĮKę¬╚ź──Ż¼Ą½╩Ūī”ė┌ÖCŲ„╚╦į§├┤└@ķ_č█Ū░Ą─šŽĄK╬’╠žäeį┌ąąĪŻ
▀@ā╔éĆīė┤╬Ą─ęÄ(gu©®)äØ─ŻēKģf(xi©”)═¼╣żū„Ż¼ÖCŲ„╚╦Š═┐╔ęį║▄║├Ą─īŹ¼F(xi©żn)Å─A³cĄĮB³cĄ─ųŪ─▄ęŲäė┴╦ĪŻ
īŹļH╔ŽŻ¼SLAM╦ŃĘ©▒Š╔Ēų╗╩Ū═Ļ│╔┴╦ÖCŲ„╚╦Ą─Č©╬╗║═ĄžłDśŗ(g©░u)Į©ā╔╝■╩┬ŪķŻ¼┼c╬ęéāšfĄ─ī¦(d©Żo)║ĮČ©╬╗▓ó▓╗╩Ū═Ļ╚½Ą╚ārĄ─ĪŻ▀@└’Ą─ī¦(d©Żo)║ĮŻ¼ŲõīŹ╩ŪSLAM╦ŃĘ©ū÷▓╗┴╦Ą─ĪŻ╦³į┌śI(y©©)ā╚(n©©i)Įąū÷▀\äėęÄ(gu©®)äØ(Motion Planning)ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦(d©Żo)ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦(d©Żo)į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦(d©Żo)ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖCŲ„╚╦ |



