

Į³╚šŻ¼ųą┐Ųį║ūįäė(d©░ng)╗»╦∙┬ĀėX─Żą═┼cšJ(r©©n)ų¬ėŗ(j©¼)╦ŃłF(tu©ón)ĻĀ(du©¼)├µŽ“Óąļs▒│Š░Ž┬Ą─ęĢėXĖąų¬å¢Ņ}Ż¼╠ß│÷Š▀ėą═¼īėé╚(c©©)Ž“╝żäŅ(l©¼)║═ęųųŲĄ─ŠĒĘe├}ø_╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)─Żą═Ż¼į┌ČÓéĆ(g©©)ś╦(bi©Īo)£╩(zh©│n)öĄ(sh©┤)ō■(j©┤)╝»╔Ž▒Ē¼F(xi©żn)│÷▌^║├ĄžūR(sh©¬)äeąį─▄║═įļ궶ö░¶ąįĪŻįōšō╬─ęč▒╗IJCAI 2020┤¾Ģ■(hu©¼)Įė╩šĪŻ
╚ń╣¹ėą╚╦│»─Ń╚ė▀^üĒę╗éĆ(g©©)Ū“Ż¼═©│Ż─ŃĢ■(hu©¼)į§├┤▐kŻ┐Ī¬Ī¬«ö(d©Īng)╚╗╩Ū±R╔Ž░č╦³ĮėūĪĪŻ
▀@éĆ(g©©)å¢Ņ}╩Ū▓╗╩Ū║▄║å(ji©Żn)å╬Ż┐Ą½īŹ(sh©¬)ļH╔ŽŻ¼▀@ę╗▀^│╠╩ŪūŅÅ═(f©┤)ļsĄ─╠Ä└Ē▀^│╠ų«ę╗Ż║╩ūŽ╚Ż¼į┌Å═(f©┤)ļsĄ─▒│Š░Łh(hu©ón)Š│Ž┬Ż¼Ū“▀M(j©¼n)╚ļ╚╦Ą─ęĢę░Ż¼▒╗ęĢŠW(w©Żng)─ż▓ČūĮĄĮ║¾Ż¼Įø(j©®ng)ęĢėX═©┬Ę░l(f©Ī)╦═ĄĮ┤¾─X╠Ä└ĒęĢėXą┼ŽóĄ──Xģ^(q©▒)Ż¼▀M(j©¼n)ąąĖ³╝ėÅžĄūĄ─łDŽ±Ęų╬÷ĪŻ═¼Ģr(sh©¬)ęĢŲżīė┼cŲõ╦¹─Xģ^(q©▒)ģf(xi©”)ū„Ż¼┼ąöÓ╬’¾wĄ─ĘNŅÉŻ¼ŅA(y©┤)£y(c©©)╦³Ą─ąą▀M(j©¼n)▄ē█EŻ¼ūŅĮK═©▀^é„│÷╔±Įø(j©®ng)┐žųŲ╝Ī╚ŌĄ─▀\(y©┤n)äė(d©░ng)Ż¼øQČ©╚╦Ą─Ž┬ę╗▓Įąąäė(d©░ng)Ż║┼eŲļp╩ųĪóĮėūĪŪ“ĪŻ╔Ž╩÷▀^│╠ų╗į┌┴Ń³c(di©Żn)Äū├ļā╚(n©©i)░l(f©Ī)╔·Ż¼Äū║§═Ļ╚½╩ŪŽ┬ęŌūR(sh©¬)Ą─ąą×ķŻ¼ę▓║▄╔┘Ģ■(hu©¼)│÷▓ŅÕe(cu©░)ĪŻ
×ķ┴╦ūīėŗ(j©¼)╦ŃÖC(j©®)─ŻĘ┬▀@ę╗▀^│╠Ż¼╩ūŽ╚ąĶę¬ūīėŗ(j©¼)╦ŃÖC(j©®)ū÷ĄĮŽ±╚╦ŅÉ─ŪśėĪ░┐┤Ī▒Ż¼ė╚Ųõ╩Ūį┌Óąļs▒│Š░Ž┬Ž±╚╦ŅÉ─Ūśė┐ņ╦┘£╩(zh©│n)┤_ĄžĪ░┐┤Ī▒Ż¼│╔×ķ┴╦Į³─ĻüĒęĢėXĖąų¬▀@ę╗蹊┐ŅI(l©½ng)ė“éõ╩▄ĻP(gu©Īn)ūóĄ─ĻP(gu©Īn)µIå¢Ņ}ų«ę╗ĪŻ
Į³─ĻüĒŻ¼╗∙ė┌╠▌Č╚Ę┤Ž“é„▓źĄ─├}ø_╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)Ż©SNNŻ®ė¢(x©┤n)ŠÜĘĮĘ©ųØu┼dŲĪŻį┌▀@ĘNė¢(x©┤n)ŠÜĘĮĘ©Ž┬Ż¼SNN─▄ē“į┌▒Ż┴¶╔±Įø(j©®ng)į¬ā╚(n©©i)▓┐äė(d©░ng)┴”īW(xu©”)Ą─═¼Ģr(sh©¬)½@Ą├▌^║├Ą─ąį─▄ĪŻ
į┌┤╦╗∙ĄA(ch©│)╔ŽŻ¼ūįäė(d©░ng)╗»╦∙┬ĀėX─Żą═┼cšJ(r©©n)ų¬ėŗ(j©¼)╦ŃłF(tu©ón)ĻĀ(du©¼)─ŻĘ┬┐╠«ŗęĢ┬ĀėXŽĄĮy(t©»ng)╔±Įø(j©®ng)į¬é╚(c©©)Ž“ū„ė├Ą─öĄ(sh©┤)īW(xu©”)─Żą═äė(d©░ng)æB(t©żi)╔±Įø(j©®ng)ł÷(ch©Żng)Ż¼╠ß│÷┴╦Š▀ėąé╚(c©©)Ž“ū„ė├Ą─SNNĪ¬Ī¬LISNNŻ¼ė├ė┌łDŽ±ūR(sh©¬)äe╚╬äš(w©┤)ĪŻ▓óŪęį┌£y(c©©)įćųąŻ¼Ė∙ō■(j©┤)é╚(c©©)Ž“ū„ė├Ą─äė(d©░ng)┴”īW(xu©”)╠ž³c(di©Żn)Ż¼╚╦×ķ╝ė╚ļįļ┬Ģęį“×(y©żn)ūCé╚(c©©)Ž“ū„ė├ī”(du©¼)ŠW(w©Żng)Įj(lu©░)¶ö░¶ąįĄ─╠ß╔²ĪŻ
į┌╔·╬’╔±Įø(j©®ng)ŽĄĮy(t©»ng)Ą─Ėą╩▄Ų„ųą┤µį┌ų°┼RĮ³╔±Įø(j©®ng)į¬ķgĄ─ŽÓ╗źęųųŲ║═ŽÓ╗ź╝żäŅ(l©¼)ĪŻŲõųąŻ¼é╚(c©©)Ž“ęųųŲūŅ│§×ķĮŌßī±R║šÄ¦ą¦æ¬(y©®ng)Č°╠ß│÷Ż¼╝┤╚╦éā?c©©)┌├„░Ąūā╗»▀ģĮń╔Ž│Ż│ŻĢ?hu©¼)į┌┴┴╠Ä┐┤ĄĮę╗ŚlĖ³┴┴Ą─╣ŌĦȰį┌░Ąģ^(q©▒)┐┤ĄĮę╗ŚlĖ³░ĄĄ─ŠĆŚlŻ©ęŖłD1Ż®ĪŻ▀@ĘNé╚(c©©)Ž“ū„ė├║¾üĒį┌„cĪ󞳥╚ČÓĘNäė(d©░ng)╬’Ą─▓╗═¼ĖąėXŽĄĮy(t©»ng)ųą▒╗ūCīŹ(sh©¬)▓óæ¬(y©®ng)ė├į┌Ę┬╔·Ą─ėŗ(j©¼)╦Ń─Żą═ųąĪŻ
łD1. ±R║šÄ¦ą¦æ¬(y©®ng)╩ŠęŌŻ©łDę²wikiŻ®
LISNNĄ─ĮY(ji©”)śŗ(g©░u)╚ńłD2╦∙╩ŠŻ¼Ū░Č╦╩Ūā╔īėŠ▀ėąŠĒĘeĖą╩▄ę░Ą─├}ø_╔±Įø(j©®ng)į¬īėŻ¼├┐īė║¾├µėąę╗īėŲĮŠ∙│ž╗»īėŻ¼║¾Č╦╩Ūā╔īė╚½▀BĮėĄ─├}ø_╔±Įø(j©®ng)į¬īėĪŻŠ▀ėąŠĒĘeĖą╩▄ę░Ą─├}ø_╔±Įø(j©®ng)į¬į┌─Żą═ųą│ąō·(d©Īn)╠žš„╠ß╚ĪĄ─╣”─▄Ż¼ŅÉ╦Ųė┌Ėą╩▄Ų„Ą─ū„ė├Ż¼ę“┤╦ų╗į┌▀@īėĮY(ji©”)śŗ(g©░u)ųą╩╣ė├é╚(c©©)Ž“ū„ė├ĪŻį┌é╚(c©©)Ž“ū„ė├ÖC(j©®)ųŲŽ┬Ż¼├┐éĆ(g©©)├}ø_╔±Įø(j©®ng)į¬Ą──żļŖ╬╗Č╝Ņ~═Ō╩▄ÓÅė“ā╚(n©©i)Ą─Ųõ╦¹╔±Įø(j©®ng)į¬╔Žę╗Ģr(sh©¬)┐╠ĀŅæB(t©żi)Ą─ė░ĒæĪŻį┌─┐Ū░ęčėąĄ─╩╣ė├é╚(c©©)Ž“ū„ė├Ą─ėŗ(j©¼)╦Ń─Żą═ųąŻ¼é╚(c©©)Ž“ū„ė├ŽĄöĄ(sh©┤)═∙═∙╩Ū╣╠Č©Ą─║═╔±Įø(j©®ng)į¬ķgŠÓļxŽÓĻP(gu©Īn)Ą─║»öĄ(sh©┤)Ż¼Č°LISNNųąĄ─é╚(c©©)Ž“ū„ė├ŽĄöĄ(sh©┤)ät┐╔ęį═©▀^Ę┤Ž“é„▓ź▀M(j©¼n)ąąīW(xu©”)┴Ģ(x©¬)ĪŻ
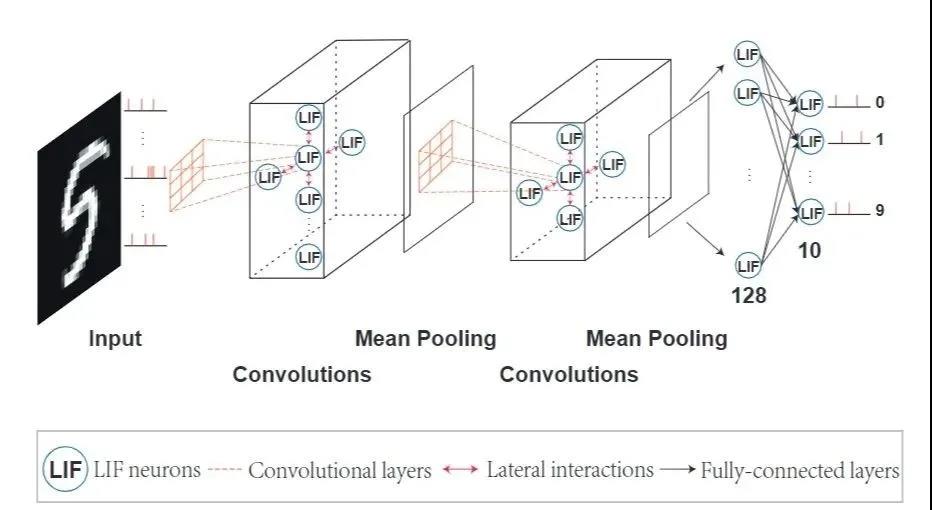
łD2 LISNN─Żą═ĮY(ji©”)śŗ(g©░u)╩ŠęŌłD
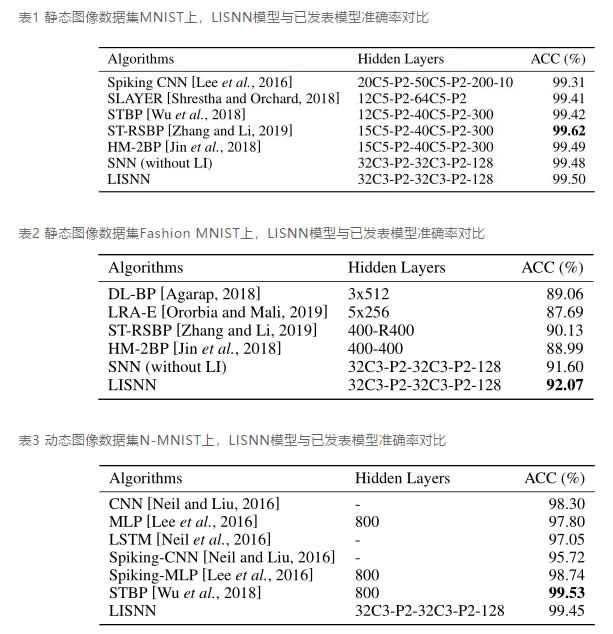
įō蹊┐╣żū„Ęųäeį┌ņoæB(t©żi)öĄ(sh©┤)ō■(j©┤)╝»MNIST┼cFashion MNISTĪóäė(d©░ng)æB(t©żi)öĄ(sh©┤)ō■(j©┤)╝»N-MNIST╔Žī”(du©¼)LISNNĄ─ąį─▄▀M(j©¼n)ąą┴╦“×(y©żn)ūCĪŻ▌ö╚ļöĄ(sh©┤)ō■(j©┤)ęį╠žČ©ĘĮ╩ĮŠÄ┤a×ķę╗Č©ķL(zh©Żng)Č╚Ą─├}ø_ą“┴ąŻ¼├┐éĆ(g©©)Ģr(sh©¬)┐╠Ą─ą“┴ąęÄ(gu©®)─Ż┼cįŁłDŽ±Ż©╗“╩┬╝■³c(di©Żn)ū°ś╦(bi©Īo)ĘČć·Ż®ŽÓ═¼ĪŻ─Żą═į┌MNIST║═N-MNISTöĄ(sh©┤)ō■(j©┤)╝»╔ŽŠ∙╚ĪĄ├┴╦║═ęčėąūŅ║├ąį─▄ŽÓĮ³Ą─ĮY(ji©”)╣¹Ż╗į┌Fashion-MNISTöĄ(sh©┤)ō■(j©┤)╝»╔Žät╚ĪĄ├┴╦SNNųąĄ─ūŅ║├ąį─▄ĪŻ▒Š─Żą═┼cęč░l(f©Ī)▒Ē─Żą═Ą─ąį─▄ī”(du©¼)▒╚ęŖ▒Ē1-3ĪŻ
│²┤╦ų«═ŌŻ¼łF(tu©ón)ĻĀ(du©¼)▀Ć▀xō±į┌MNIST║═Fashion MNISTĄ─£y(c©©)įć╝»ųą╝ė╚ļ▓╗═¼╦«ŲĮĄ─Ė▀╦╣įļ┬Ģ║═├}ø_įļ┬ĢŻ¼ęį▀M(j©¼n)ę╗▓Į£y(c©©)įćé╚(c©©)Ž“ū„ė├ī”(du©¼)ŠW(w©Żng)Įj(lu©░)¶ö░¶ąįĄ─╠ß╔²ĪŻłD3š╣╩Š┴╦▓┐ĘųįŁ╩╝łDŲ¼║═╝ėįļ║¾Ą─łDŲ¼ĪŻ
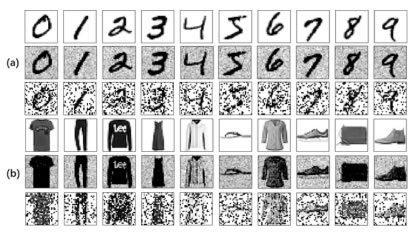
łD3 Ż©aŻ®╚²ąąę└┤╬×ķįŁ╩╝MNIST£y(c©©)įć╝»łDŲ¼Īó╝ė╚ļĖ▀╦╣įļ┬Ģ║¾Ą─łDŲ¼Īó╝ė╚ļ├}ø_įļ┬Ģ║¾Ą─łDŲ¼
Ż©bŻ®╚²ąąę└┤╬×ķįŁ╩╝Fashion MNIST£y(c©©)įć╝»łDŲ¼Īó╝ė╚ļĖ▀╦╣įļ┬Ģ║¾Ą─łDŲ¼Īó╝ė╚ļ├}ø_įļ┬Ģ║¾Ą─łDŲ¼
łD4ųąŻ¼╗ęŠĆ║═╦{(l©ón)ŠĆĘųäe┤·▒ĒLISNN║═ø]ėąé╚(c©©)Ž“ū„ė├Ą─SNNį┌╠Ē╝ė┴╦Ė▀╦╣įļ┬ĢĄ─£y(c©©)įć╝»╔ŽĄ─£╩(zh©│n)┤_┬╩Ż╗³SŠĆ║═│╚ŠĆĘųäe┤·▒ĒLISNN║═ø]ėąé╚(c©©)Ž“ū„ė├Ą─SNNį┌╠Ē╝ė┴╦├}ø_įļ┬ĢĄ─£y(c©©)įć╝»╔ŽĄ─£╩(zh©│n)┤_┬╩ĪŻį┌┤¾▓┐ĘųŪķørŽ┬Ż¼LISNNĄ─ąį─▄ōp╩¦Č╝ąĪė┌ø]ėąé╚(c©©)Ž“ū„ė├Ą─SNNŻ¼ė╚Ųõ╩Ūį┌ė¢(x©┤n)ŠÜ╝»ųąø]ėą╠Ē╝ėįļ┬ĢöĄ(sh©┤)ō■(j©┤)Ą─ŪķørŽ┬ĪŻ
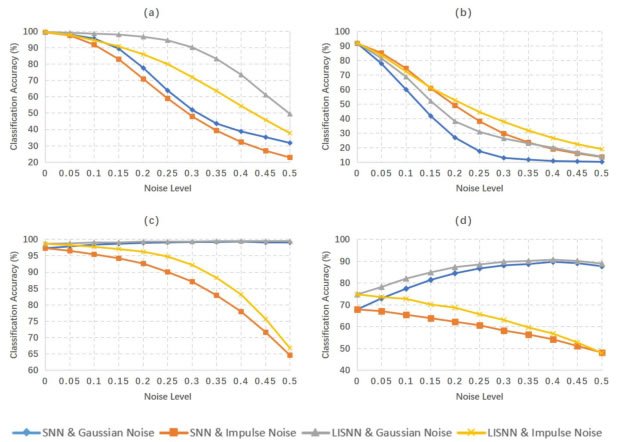
łD4 Ż©aŻ®─Żą═į┌¤oįļ┬ĢĄ─MNISTė¢(x©┤n)ŠÜ╝»╔Žė¢(x©┤n)ŠÜĪŻŻ©bŻ®─Żą═į┌¤oįļ┬ĢĄ─Fashion MNISTė¢(x©┤n)ŠÜ╝»╔Žė¢(x©┤n)ŠÜ
Ż©cŻ®─Żą═į┌ėąĖ▀╦╣įļ┬ĢĄ─MNISTė¢(x©┤n)ŠÜ╝»╔Žė¢(x©┤n)ŠÜĪŻŻ©dŻ®─Żą═į┌ėąĖ▀╦╣įļ┬ĢĄ─Fashion MNISTė¢(x©┤n)ŠÜ╝»╔Žė¢(x©┤n)ŠÜ
┼cé„Įy(t©»ng)Ą─╔±Įø(j©®ng)ŠW(w©Żng)Įj(lu©░)╦ŃĘ©ŽÓ▒╚Ż¼╦∙╠ß╦ŃĘ©─▄╚ĪĄ├▌^║├Ą─ąį─▄▓óūį╚╗ĄžīŹ(sh©¬)¼F(xi©żn)ī”(du©¼)įļ┬ĢĖ╔ö_Ą─┐╣ąįŻ¼Š▀ėąę╗Č©└Ēšō蹊┐?j©®)r(ji©ż)ųĄ║═╣ż│╠īŹ(sh©¬)ė├ār(ji©ż)ųĄĪŻ
 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |



